Note of caution
This is the beta version of the dataset, and might change in the near future. We will keep registered users up-to-date, but please make sure to check this page for the latest version.
What is in the archive?
This archive contains the beta version of the Sintel-stereo training set. For each of the training sequences, it contains:
Clean & final pass images
The images are rendered from two cameras with a baseline of 10 cm apart. The left frame is always the reference frame.
Disparities
The disparities are given as negative disparities in the left frame.
Occlusions and out-of-frame pixels
We include masks for occluded pixels, which are visible in the left frame but not in the right frame.
Additionally, we provide masks showing the out-of-frame pixels, which are visible in the left frame, but leave the visible area in the right frame. These pixels are not taken into account for the evaluation.
SDK
The SDK includes example scripts to read/write the disparity data, and documentation on the data format.
How was it generated?
The images as rendered from the left view are largely the same as in the optical flow benchmark, with the exception of atmospheric effects. Since the overlaying fog effects (for example, in the ambush sequences) are created using a 2D layer, they do not produce correct parallax, and hence, were removed.
The right view was generated by moving the camera 10 cm to the right parallel to the image plane, and re-rendering the images in both the final and the clean pass.
The disparities were generated by inversely triangulating each pixel using the known focal length, depth for each pixel, and baseline distance.
The occlusions were generated by warping the depth as seen from the right camera using the known ground truth disparities. The pixel for which the depth difference between the warped right depth image and the left depth image is larger than 1 cm are considered to be occluded / unmatched.
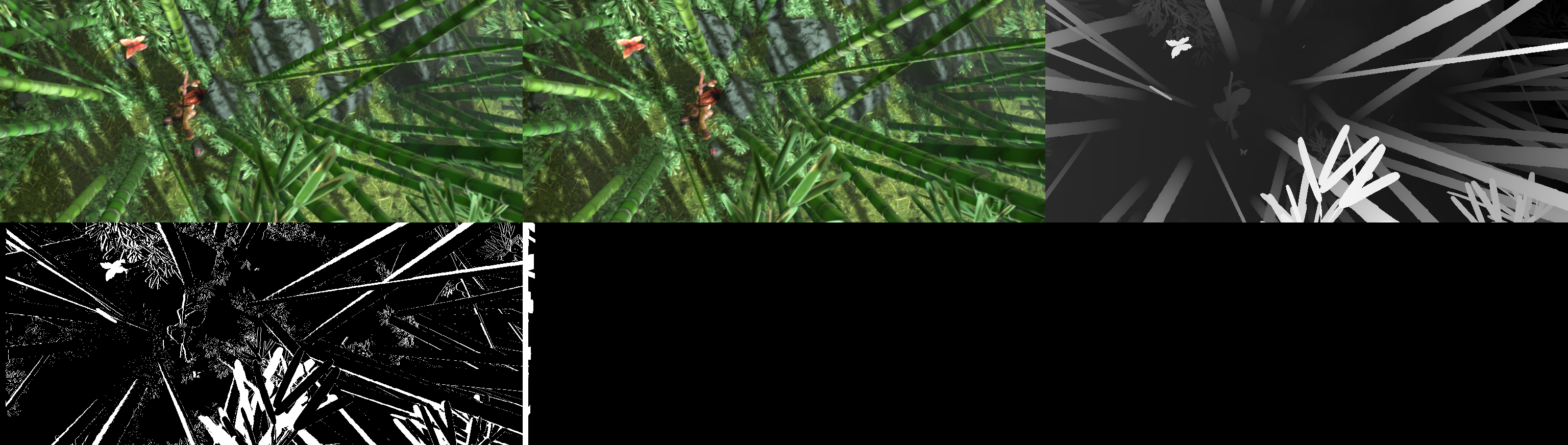
Examples
The top row of these examples show the left view, the right view, and the disparities. The bottom row shows the occluded pixels and the out-of-frame pixels.


Contact & citation
If you have any questions or problems regarding this dataset, please do not hesitate to contact us.
If you use this work, please cite:
@inproceedings{Butler:ECCV:2012,
title = {A naturalistic open source movie for optical flow evaluation},
author = {Butler, D. J. and Wulff, J. and Stanley, G. B. and Black, M. J.},
booktitle = {European Conf. on Computer Vision (ECCV)},
editor = {{A. Fitzgibbon et al. (Eds.)}},
publisher = {Springer-Verlag},
series = {Part IV, LNCS 7577},
month = oct,
pages = {611--625},
year = {2012}
}